yeah yeah yeah, more robots.....so many robots so little time
heres my latest set of robots...all of this was built AFTER the los alamos workshop. If I'm not at work I'm probably building robots or playing with new car parts or something.
|
|
|
Bottom of Turbot #1
this is the bottom of my turbot. you can see the two servos for geramotors (big black servo thingy's) and the rechargable battery...uuuhhhhh....and thats pretty much it. the cable coming off of the bot is it's recharge cable. |
that's my first walker using 3 bicores. one is used for reversing &turning.the other two are a simple master/slave bicore combination. I added front sensors that short the reverser (or mux) to ground to reverse it,and and rear sensors to shorts the mux to +5vdc to make it decide to go forward again if it hits somthing while backing up.
you can see an extra bicore on an upper level.that bicore was origionally going to be a lighthead type of bicore set up to turn the walker,but lighthead cicuits get too noisy with 3 other bicores going at once and make the robot kinda jittery when turning.so I ripped it off for the smoothness of operation I get when it only has reversing and turning (and the rear "re-reversing" or "forwarding" sensor) |
|
|
|
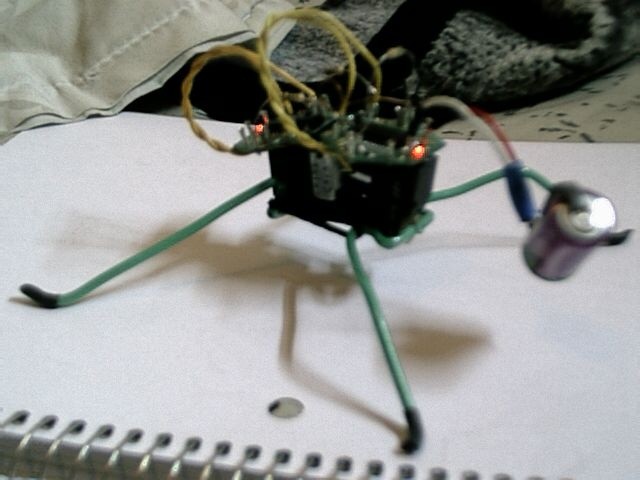
This is My Micro Walker in progress:.....
this thing is tiny! it is so small that when I power it up it only needs 1 meg resistors to bias the bicore tiles! It takes tiny steps (but they are quite high for it's size actually). I still don't have a power supply for this untill I freeform a tiny miller engine so I just use this little tiny 3.6vdc lithium battery. I'm not shure what the amperage of the battery is but the walker carries the battery just fine.it uses two tiny floppy disk drive eject motors out of some redicoulously old computer and two of tilden's bicore tiles. hhhhmmmmm
tilden's tiles = pandora's box? uhhhh just a little beam humor..
you can also see in this pic that I used the legs to act as "bicore slop stoppers" witch basically keeps the legs from turning to far when they walk back and fourth and also so it doesn't "veer to one side". there is also some centering rubberbands attached to both legs
|
side view...
this pic shows the solid copper wire legs I used. they are kinda the same thing as solarbotics "gumby" legs but a little thinner.they also have a plastic green insulation which is cool looking
|
|
|
|
here is a shot of those hextile bicores.to get an idea of how big a hextile bicore is....find an 74hct240 (or ac240). the whole board is as long as one 20 pin integrated circuit (I.C. ..or the thing you are holding in your hand if you went and got a 74hct240. if you don't have one,radio shack does.(most of them)
so (hint hint!!!) if you freeform your bicores you can get just as small as a hextile! |
heres the front..........
you can really see the leg shaped "bicore slop stoppers" and the rubber bands here
|
|
|
|
walking!
here it is walking with its lithium battery |