here is some of my latest bots since monday, july 29th 2002
I also made that last "microwalker" a week ago. I've figured out the bicore like theres no tomorrow!
I'm starting to freeform enable-able bicores and I'm working on building a solar 2 degree-of-freedom
light seeking head,an 8 motor quadrapod,and I have to find a tiny power supply for my microwalker...so I'm pretty buissy with robot stuff right now!! I also found some good thermistors at radioshack that I used on my thermalpopper,so I'll be playing with those a little bit more too,Aaaand I finally got some mac drive gear motors...lots of new stuff still to come!here's some pics!
|
|

and here is my Thermalpopper
this is a standard photopopper circuit except that it uses Thermistors. thay varry in resistance relitive to the temperature. if there is heat then it has less resistance,if there is cold then it has more resistance.they are also bi-polar and don't have a polarity.cool huh? I saw something on one of mark tildens robots like this that he uses to put on overhead projectors at demonstrations.mine is made for shadow following/avoiding to keep it's solar cells (1/8" squared scpd's from solarbotics) in the light without any type of visual sense. this works really good when it is hot out side.the shade is always a few degrees cooler and when the robot feels the cooler air in the shade it turns away to the heat for more energy. I also used 1381 c's for quick action and high fun factor...people like to watch things that move and can't understand "why isn't it going anywhere?" "it's charging" I always say,and then they lose interest and do something else. this thing pops all over the place and keeps people busy.
|
top view
you can kind-of see the solar engine set up.the top row of 3 transistors is one solar engine and the bottom row is the other.it uses a 3300uf cap for power storage and pager motors for actuation.those solar cells provide .4vdc in sunlight and I used 7 to achieve a voltage of 2.8 vdc, wich is good enough for the 1381 c's wich trigger at 2.0-2.2vdc I think.. |
|
|
|
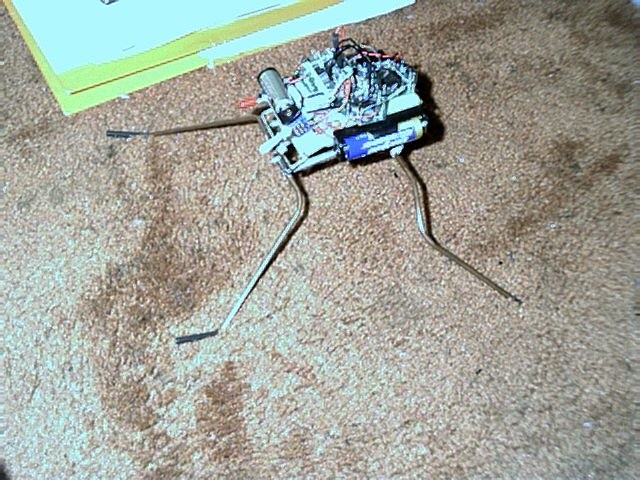
My newest 3 motor walker using bio bug motors!!!!
check this nutty thing out!! I never thought I'd get this far into b.e.a.m. robotics but this robot just makes me happy I ever stared doing all this crazy robot madness that keeps me awake at night!heres a list of parts:
two 90 degree bio bug motors
one offset bio bug motor (witch I sadly robed two perfectly good bio bugs of,but you can now get these motors from www.solarbotics.com)
four of Tildens Hextile Bicores (Bc4)95 (one is used as a "heartbeat" to "shock step" the walker...or atleast this is what Grant from solarbotics said..(thanks for the help grant!)
two High current low voltage rechargable batteries (1.2v @ 1200mAh)
two single aa battery holders
one "N" size battery
one N size battery holder
center off two position on switch (for extra features)
one on/on switch (for power on and off)
and a motor solderable shaft mod for those hard to mount to bio bug motor shafts.
the red switch operates power and the other one selects between normal walk forward mode(center),pushing it down makes it walk with only the front legs and not the back,witch makes it kinda crawl forward,a weak version of a one motor walker!!! and flipping the switch all the way up makes the walker only use it's back legs (witch results in a sort of "dancing" like behavior.
|
figuring out the bias....
I had a chassi for this robot just sitting there for a while totally stumped as to how I would make it work.one day I just started playing with my bicores and decided to tackle it. I first decided to set the front legs' bias resistor and then make the leg stops (stop the legs from going to far)then I synched the rear two bicores by thier outer most inputs and then synched the two together by thier inner most inputs. then I set THIER biasing resistance and plugged in a battery. the thing went crazy all over and my friend said it looked like it was breakdancing.but two more weeks of playing with the resistors and I got it down to a nice steady walk with no slop or bicore noise throwing the circuit outof wack....the it was time for the heartbeat shock step cicuit and I had to start all over with the biasing....RRRRRRRRRRRRRRRRRr |
|
|
|
switch closup
but in the end...it all worked out to be even better and I also added those cool extra features (dancing,and one motor walking) with those cool switches. I was amazed at it's "learn to walk ability" when I turn it on it takes a second for the bicores to sync together.when they do,they pause for a sec and then the smooth walking motin starts up. I gotta add some tuning on this bad boy but I still have to figure out my sensor tiles. |
there it goes!!!
here it is tuned on! look at the cool surface mount led's on the bicore tiles all lit up. this 'bot walks on all kinds of surfaces uncluding carpet and bedspreads! |
|
|
|
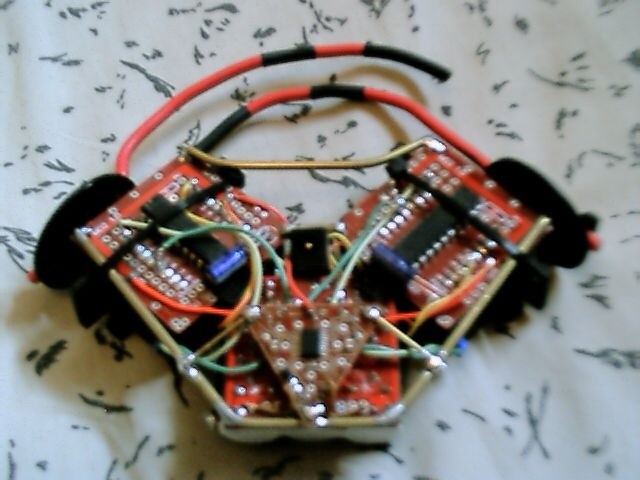
heres the bottom
you can see the springs that attach to the front legs from the back ones. these help center the back ones because they don't use leg stops! the circuit seems to have enough controll with this leg design to keep it all going straight and smooth. I also have one leg spacer rubber band between the two legs. I LOVE THIS ROBOT AND IT IS FAR FROM BEING DONE!!! |
upgraded turbot...
I added a heartbeat bicore (little red triangle) to make it so that only one leg of my turbot moves at a time this makes it much more effective at light seeking.I also added new flagela that I can bend and reconfigure to find better leg shapes |
|
|
|
an action shot
hers my turbot trying to get out the window but it won't go into the shadow! |
another still life
you can try to get out the window all day long but your gonna have to wait untill night!!! |
|
|
|
the start of my 2 degree of freedom light seeking head.
heres the frame made up of mac drive motors and some copper rod |
|
|
|
|
|
|
|